
25년도 드론 4종 온라인 문제를
살펴보는 시간~^^
이번 기출문제는 범위는
무인비행장치시스템에 대해 알아보려고 합니다.
무인비행장치시스템
Q. 다음중 기체에 작용하는 힘에 대한 설명중, 기체에 작용하는 힘이 아닌 것은?
- 기체속도에 따라 무게중심 기준으로 상승하는 힘이 양력이라 한다.
- 기체의 양력을 방해하는 힘은 중력이다.
- 항력을 이기고 전진하는 힘을 추력이라고 한다.
- 기체에 작용하는 힘은 CG포인트 보다 추력이 우선한다.
정답은 4번
CG(Center of Gravity) 무게중심은
기체 전체 질양이 집중된 지점을 말하는데,

비행 중 안정성과 조종성에 엄청나게 중요합니다.
그래서 추력이 아무리 크더라도, CG가 잘못되면,
기체는 제대로 비행이 불가능하며,
예를 들어 기체가 너무 앞이나 뒤로 쏠리면 위험합니다.
결국
비행 안정성에서는 CG가 추력보다 휠씬 중요합니다.
Q. 무인비행장치에 작용하는 4가지 힘에 대한 설명으로 맞는 것은?
- 추력(Thrust), 양력(Lift), 항력(Drag), 무게(Weight)
- 추력, 양력, 무게, 하중
- 추력, 모멘트, 항력, 중력
- 비틀림력, 양력, 항력, 중력
정답은 1번
무인비행장치(UAV)에는 기본적으로 4가지 힘이 작용합니다.
추력, 양력, 항력, 중력 이며,

4가지 힘
추력, 항력, 양력, 중력이 항상 서로 밀고 당기면서
기체를 움직이게 하거나, 뜨거나, 안정시키게 됩니다.
Q. 다음중 브러쉬리스 모터에 사용되는 전자변속기(ESC)에 대한 설명으로 옳은 것은?
- 모터의 회전수를 제어하기 위해서 사용
- 모터의 온도를 제어하기 위해서 사용
- 모터의 무게를 제어하기 위해서 사용
- 모터를 냉각하기 위해서 사용
정답은 1번
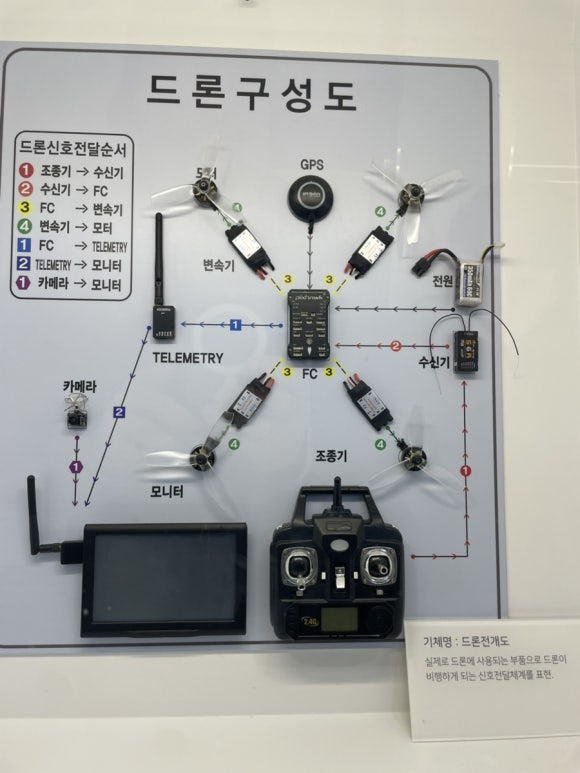
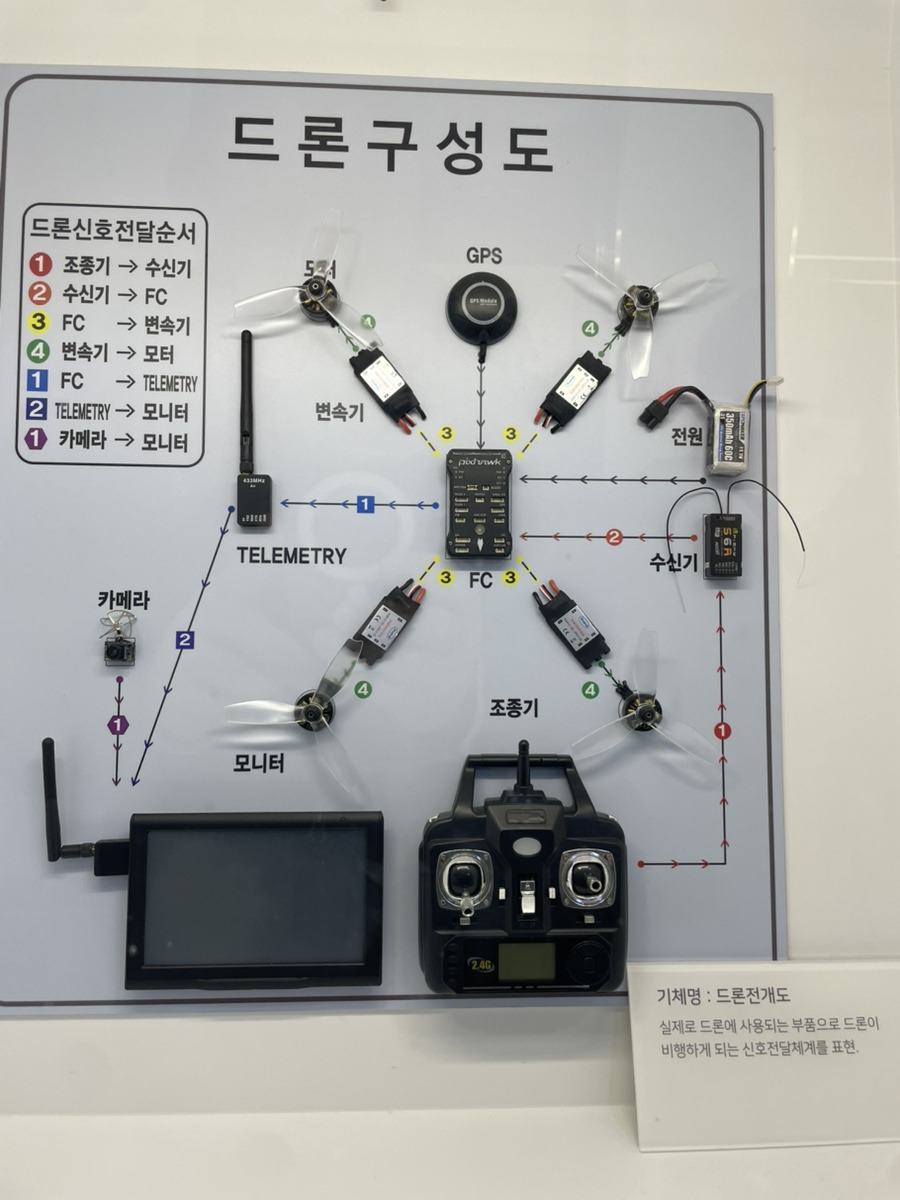
아래 드론구성도 사진을 보면,
브러쉬 리스(BLDC) 모터에 변속기(ESC)가 사용됩니다.

자세히 설명하면,
브러쉬리스 모터는 자체적으로 전기 스위칭을 할 수 없기 때문에,
ESC가 전기 신호를 3상(three-phase)으로 바꿔서
모터를 회전시켜줘야 합니다.
하지만 브러쉬 모터에는 ESC(전자변속기)가 없습니다.
Q. 리튬폴리머 배터리에 대한 설명으로 옳지 않은 것은?
- 배터리 1셀의 정격전압은 3.7V이다.
- 배터리 용량은 mAh 단위로 표기한다.
- 방전률이 클수록 전압이 높다
- 4셀 배터리 정격전압은 14.8V이다.
정답은 3번
드론에 사용되는 배터리는 리튬계열인
리튬폴리머(Li-Po) 및 리튬이온(Li-Ion) 을 사용합니다.
리튬배터리는 1셀의 정격 전압은 3.7V이고,
그리고 4셀은 4S*3.7V=14.8V입니다.
또한 배터리 용량은 mAh(밀리암페어시)를 표기합니다.
여기서 방전률이 클수록 전압이 높다는 것은
전압이 높은 게 아니라, 순간적으로 더 많은 전류를
낼 수 있다는 의미입니다.
그런데 여기서 방전률이란?
방전률이란(C-Rating)?

배터리가 얼마나 빠르게 에너지를 꺼낼 수 있는지를
나타내는 숫자입니다.
쉽게 말해, "방전률은 배터리의 힘의 세기"라고
생각하시면 됩니다.
방전률을 C라고 표기하고, 배터리 용량과 연결되어서,
1C는 배터리 용량만큼의 전류를
1시간 동안 지속할 수 있다는 속도입니다.
다시 예를 들면,
2,000mAh (2Ah) 30C 배터리가 있다면,
- 최대 방전 전류 = 2Ah × 30C = 60A
즉, 이 배터리는 최대 60암페어까지 순간적으로 꺼낼 수 있습니다.
여기서 중요한 것은
방전률을 너무 초과하면,
배터리가 과열되고, 부풀어오르고,
폭발 위험에 노출될 수 있습니다.

마지막 문제로
Q. 비행제어컴퓨터(FC)의 작동원리에 대한 설명으로 옳지 않은 것은?
- 자세제어를 위해 관성측정장치(IMU)센서 활용
- 센서 오차가 발생해도 정밀한 비행제어 수행 가능
- 제자리 비행 등 위치제어를 위성항법시스템 활용
- 제어이득 튜닝을 통한 비행제어 성능 조절
정답은 2번
제일 중요한 문제이고, 어려운 용어가 나와서
더 어려운 문제이기도 합니다.
비행제어컴퓨터(FC)는 드론에 두뇌라고 할 수 있습니다.
자세제어를 위해 관성측정장치(IMU)를 사용하고,
제자리 비행을 위해 위성항법장치인 GPS(GNSS)를 사용합니다.
여기서 제어이득이란?
제어이득(Control Gain)?
제어이득(Control Gain)이란?
"기체(드론)가 센서로 상태를 감지했을 때,
얼마나 빠르고, 세게 반응할지를 조절하는
'민감도 설정값'" 이라고 생각하면 됩니다.

쉽게 말하면,
비행제어컴퓨터(FC)는 자세를 유지하거나,
기체를 조종하기 위해 PID제어를 합니다.
- P(Propotional) 비례
- I(Integral) 적분
- D(Derivative) 미분
드론 조종은 PID(비례, 적분, 미분)을 통해
원하는 곳으로 이동할 수 있게 됩니다.
그래서 제어이득 튜닝을 이용해서
기체가 얼마나 빠르고 강하게 반응할 지를
튜닝을 통해 PID를 조종하게 됩니다.
#드론필기시험문제 #드론4종 #드론이론시험문제 #드론온라인시험문제 #드론시험문제 #드론기출문제 #드론국가자격증시험문제 #무인멀티콥터기출문제 #드론학과시험문제 #PID #제어이득 #fc #비행제어컴퓨터 #imu #관성측정장치 #esc #전자변속기 #브러쉬리스모터 #bldc #방전률 #crating #4가지힘 #무인비행장치에작용하는힘 #cg무게중심
'Drone > 드론 교육 및 자격증' 카테고리의 다른 글
| [드론시험] 조종자 증명시험 신분증 인정범위 기준 (7) | 2025.06.17 |
|---|---|
| [4종] 드론 필기시험 문제 알아보기(25년도)-4탄 (0) | 2025.05.27 |
| [4종] 드론 필기시험 문제 알아보기(25년도)-2탄 (0) | 2025.03.22 |
| [4종] 드론 필기시험 문제 알아보기(25년) (0) | 2025.03.15 |
| [4종] 무인동력비행장치(무인멀티콥터) 자주 출제되는 문제 알아보기(2탄) (0) | 2025.02.08 |